Синхронный Реактивный Двигатель
 Статор реактивного двигателя бывает с распределенной и сосредоточенной обмоткой, и состоит из корпуса и сердечника с обмоткой.
Статор реактивного двигателя бывает с распределенной и сосредоточенной обмоткой, и состоит из корпуса и сердечника с обмоткой.
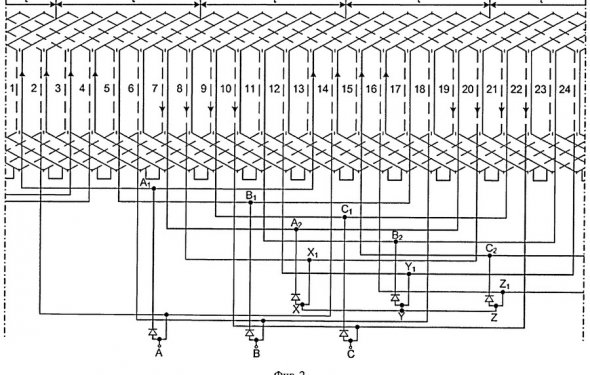
Статор синхронного реактивного электродвигателя с распределенной обмоткой
Выделяют три основных типа ротора реактивного двигателя: ротор с явновыраженными полюсами, аксиально-расслоенный ротор и поперечно-расслоенный ротор.
Ротор с явновыраженными полюсами
 Аксиально-расслоенный ротор
Аксиально-расслоенный ротор
Поперечно-расслоенный ротор
Переменный ток, проходящий по обмоткам статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя. Крутящий момент создается, когда ротор пытается установить свою наиболее магнито проводящую ось (d-ось) с приложенным полем, для того чтобы минимизировать магнитное сопротивление в магнитной цепи. Амплитуда момента прямо пропорциональна разницы между продольной Ld и поперечной Lq индуктивностями. Следовательно, чем больше разница, тем больше создаваемый момент.
 Линии магнитного поля синхронного реактивного электродвигателя
Линии магнитного поля синхронного реактивного электродвигателя
Главная идея может быть объяснена с помощью рисунка представленного ниже. Объект "a" состоящий из анизотропного материала имеет разную проводимость по оси d и оси q, в то время как изотропный магнитный материал объекта "b" имеет одинаковую проводимость во всех направлениях. Магнитное поле, которое прикладывается к анизотропному объекту "a", создает вращающий момент если существует угол между осью d и линиями магнитного поля. Очевидно, что если ось d объекта "a" не совпадает с линиями магнитного поля, объект будет вносить искажения в магнитное поле. При этом направление искаженных магнитных линий будут совпадать с осью q объекта.
Объект с анизотропной геометрией (a) и изотропной геометрией (b) в магнитном поле
Силовые линии магнитного поля вокруг объекта с анизотропной геометрией
В синхронном реактивном электродвигателе магнитное поле создается синусоидально распределенной обмоткой статора. Поле вращается с синхронной скоростью и может считаться синусоидальным.
В такой ситуации всегда будет существовать момент направленный на то, чтобы уменьшить полную потенциальную энергию системы, путем уменьшения искажения поля по оси q. Если угол сохранять постоянным, например путем контроля магнитного поля, тогда электромагнитная энергия будет непрерывно преобразовываться в механическую.
 в магнитном поле")


 @Dmitry_777 @pani_walewska @JoN_TM некому ебать штаты, а путин вон с турками тока помидорами отделался за сбитый военный самолет.
@Dmitry_777 @pani_walewska @JoN_TM некому ебать штаты, а путин вон с турками тока помидорами отделался за сбитый военный самолет.
 @vot_lucia а что за самолет то? военный? гражданский?
@vot_lucia а что за самолет то? военный? гражданский?
 @39Газет.ру: Военный самолет США с украинскими военными на борту будет летать над Россией
@39Газет.ру: Военный самолет США с украинскими военными на борту будет летать над Россией
 @Цифровые технологии: В Канаде во время авиашоу разбился военный самолет США: В Канаде 17 июля на авиашоу разбился военный самолет США. Вследствие крушения T-28…
@Цифровые технологии: В Канаде во время авиашоу разбился военный самолет США: В Канаде 17 июля на авиашоу разбился военный самолет США. Вследствие крушения T-28…